视觉SLAM学习笔记:一
第二章
下面这个网址有电子版的图书(带我的批注)
https://github.com/pumpkin-db/pumpkin-db.github.io/tree/main/%E8%A7%86%E8%A7%89SLAMPDF(%E5%B8%A6%E6%89%B9%E6%B3%A8)
数学建模抽象
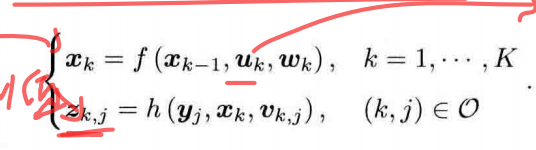
开始先给了总结SLAM过程的两个抽象方程,上面的是运动方程,下面的是观测方程,这样算是把SLAM问题变成了状态估计问题。
当然这里没怎么看懂,但一步步顺过来还是可以的。具体的以后再说
g++ cmake IDE 编译代码
g++ cmake
然后就进行到实战环节,在/home下创建了slambook2文件夹,再创建ch2文件夹,然后书写第一个cpp程序,然后使用g++进行编译,修改完权限后就可以运行编译文件,不过据笔者建议,今后为了能够顺利的方便的编译大量代码,要使用cmake命令,一般使用流程是:
- 建立CMakeLists.txt文件,加入内容,目的是告诉cmake要做什么
- 为便于管理,在本目录下建立build文件夹,使得cmake编译的文件都放到这里,和源代码分开,使用
mkdir build,然后切换目录cd build - 然后编译上级源代码
cmake .. - 最后输入
make编译即可
具体的内容直接看有笔记的PDF即可,这里不再赘述
之后介绍使用头文件的方法,依然是cmake,和在windows中Visual Studio中的方法非常相似,只不过要遵循cmake的方法。
IDE
我先使用KDevelop,跟着图书进行一点,不过这个IDE确实垃圾
所以转换VScode,在安装好插件后,进行项目的配置构建,当然是在写了CMakeLists.txt和需要的C++文件后,先建立好build文件夹mkdir build,然后安装规划的方式继续:
cd buildcmake ..
执行完以上步骤后,再打开VScode
选择配置,生成.json文件:
- 选择Linux或者CMake或者编辑.json文件
配置CMake项目: - 按下
Ctrl+Shift+P - 输入并选择
CMake: Configure - 选择GCC
构建项目: - 再次打开命令面板,运行 **
CMake: Build
配置构建结束后,根据以下方式运行即可
运行程序
- 按
Ctrl+Shift+P打开命令面板 - 输入并选择
CMake: Run Without Debugging - 如果项目有多个可执行文件,会弹出列表让你选择要运行的目标
调试程序 - 按
Ctrl+Shift+P - 输入
CMake: Debug - 选择要调试的目标
查看构建目标 - 按
Ctrl+Shift+P - 输入
CMake: Select Launch Target - 会显示所有可用的可执行文件列表
也可以自己找到编译好的可执行文件,自己去执行。
All articles on this blog are licensed under CC BY-NC-SA 4.0 unless otherwise stated.